Puma Axis Bot

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot 372382 01 Etichet Sport

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot Fiyatlari Ve Ozellikleri

Puma Axis Tr Boot Wtr Erkek Bot 37238202

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot Siyah 43 Amazon Com Tr

Puma Axis Tr Boot Wtr Erkek Bot Yorumlari

Buy Puma Bot Limit Discounts 58 Off

Encoder position is computed using the formula.
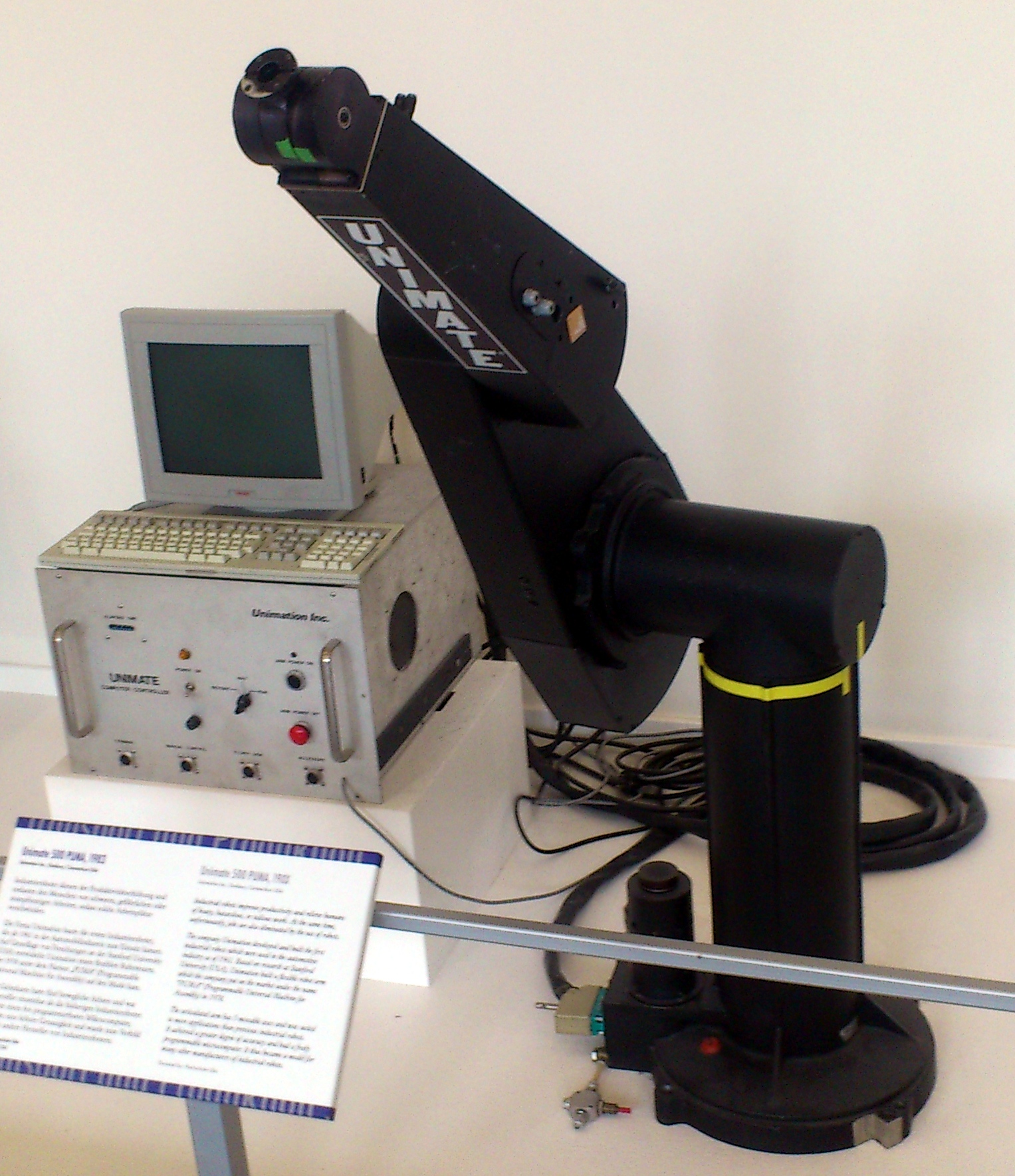
Puma axis bot. An example of a serial chain can be seen in the schematic of the puma 560 series robot2 an industrial robot manufactured by unimation inc shown in figure 1. E thetaeprn 2pi where theta is the joint angle n is the gear ratio for the given axis 10 e is the computed encoder count 2pi is 360 in the case of degrees units and epr is the encoder counts per revolution of the axis. Please set the properties appropriately to each axis based on demands and manufacture instructions. September 18th 2013 puma robot bql fon 01 jpg.
Five axis puma robot five axis puma robot loading. Puma axis boot trekingové boty dark grey tmavě šedá za 1 560 00 kč 04. 1 and 3 have opposite signs to the other models discussed and this changes the direction of the rotational axes for joints 2 and 3 the dashed arrows are reversed. Puma is an articulated robot with a chain of members connected with each other through revolute or rotary joints as that in scara but the difference is the orientation of the axes of the joints.
Unimation produced pumas for years until being purchased by westinghouse. The classical puma 560 robot is a special case of the above but there are some impor tant di erences. Five axis puma robot five axis puma robot loading. Right click on the groups icon in the left pane and choose add group.
Puma 560 anthropomorphic robot with a shoulder o set. Written for the puma 560. April 6th 2016 puma robot stp. September 18th 2013 planetary gear reducer j5 jpg.
The second joint from the base is orthogonal to the other joints. The trunk is bolted to a fixed table or the floor. September 18th 2013 puma robot bql fon 01 jpg. If the configuration is for a simulated robot change the simulated axis property to true for all axes.
September 18th 2013 planetary gear reducer j5 jpg. In puma not all the joints are parallel. August 18th 2013 puma robot new design 097 копие jpg. 2020 s bezplatnou dopravou na zalando.
Configuring the puma robot. April 6th 2016 puma robot stp.

Axis Trail Men S Winter Boots Puma Us

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot Trendyol

Puma Axis Trail Bot Glami Com Tr
Puma Axis Tr Boot Wtr Erkek Bot Yorumlari

Puma Bot 896260 Boyner Com Tr De

Puma Axis Tr Boot Wtr Erkek Bot 37238202

Puma Axis Trail Bot 2 5 Ayda Patladi Sikayetvar

Axis Trail Men S Winter Boots Puma Us

Puma Axis Tr Boot Wtr Erkek Bot 37238202

Axis Trail Men S Winter Boots Puma Us

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot 372382 01

Jual Produk Sepatu Puma Axis Murah Dan Terlengkap November 2020 Bukalapak

Puma Axis Tr Boot Wtr Obzor Youtube

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot Trendyol

Puma Axis Beyaz Lacivert Erkek Kosu Ayakkabisi Fiyati

Axis Trail Men S Winter Boots Puma Us

Puma Axis Erkek Spor Ayakkabi 368465 01 Barcin

Puma Kadin Axis 2 Sl Jr Black Black Dark Shadow Morhipo 14712945

Five Axis Puma Robot 3d Cad Model Library Grabcad

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot 372382 01

Puma Axis Gunstiger Retro Sneaker Youtube

Terjual Sepatu Olaharag Puma Axis 2 186188 04 Kaskus

Axis Trail Men S Winter Boots Puma Us

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot Trendyol

Buy Puma Bot Limit Discounts 58 Off

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot Trendyol

Buy Puma Bot Limit Discounts 58 Off

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot Trendyol

Buy Puma Bot Limit Discounts 58 Off

Puma Axis Winter Bot Trendyol

Puma Axis Winter Bot Trendyol

Jual Puma Cell Venom Alert Black Galaxy Online Oktober 2020 Blibli Com
Programmable Universal Machine For Assembly Wikipedia

Sepatu Puma Running Axis V3 Eco Ortholite Size 44 Barang Original Bukan Kw Di Surabaya Tribunjualbeli Com

Puma Develops Racing Robot That Can Beat Usain Bolt

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot Fiyatlari Ve Ozellikleri

Puma Synthetic Axis Tr Boot Wtr Trail 372381 Outdoor Shoes In Burnt Olive Burnt Olive Burnt Ol Green For Men Lyst

Puma S Beatbot Races Runners

Puma Axis Youtube

Harga Sepatu Puma Vikky Wanita Original Murah Terbaru Desember 2020 Di Indonesia Priceprice Com

Puma Axis Beyaz Erkek Kosu Ayakkabisi 100415325 Flo

Pdf Genetic Algorithm And Adaptive Model Reference Controller In Tracking Problem Of Puma 560 Arm Robot

Programmable Universal Machine For Assembly Wikipedia

Jual Puma Rs 0 Tracks Sepatu Running Pria 369362 01 Online Agustus 2020 Blibli Com

Pdf Puma 560 Robot Manipulator Position Sliding Mode Control Methods Using Matlab Simulink And Their Integration Into Graduate Undergraduate Nonlinear Control Robotics And Matlab Courses

Puma Axis Beyaz Erkek Kosu Ayakkabisi 100407793 Flo
Puma High Flying Red Men S And Women S Sports Shoes Shopee Indonesia

Harga Sneakers Puma Fenty Wanita Original Murah Terbaru November 2020 Di Indonesia Priceprice Com
Puma High Top Breathable Green Knitted Fabric Men And Women Running Shoes Shopee Indonesia

Terjual Sepatu Running Adidas Lite Pacer 2 Duramo Galaxy Puma Axis Dll All Original Kaskus
Beatbot Nicole Jenkins

Pdf Two Open Solutions For Industrial Robot Control The Case Of Puma 560

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot Trendyol

Harga Sepatu Kasual Puma Original Murah Terbaru November 2020 Di Indonesia Priceprice Com

How To Add Robot Arm Model Into Linuxcnc Linuxcnc
Jual Nike Women Air Max Axis White Pink Aa2168 107 Us5 5 8 5 2002 Online Desember 2020 Blibli

Jual Produk Sepatu Puma Axis Murah Dan Terlengkap November 2020 Bukalapak

Harga Sepatu Puma Kasual Wanita Original Murah Terbaru Desember 2020 Di Indonesia Priceprice Com

Axis Tr Boot Wtr Puma Black Puma Black Black Puma Shoes Puma

Pdf Comparative Analysis Of The Controllers For Puma 560 Robot

Jual Sepatu Touring Tinggi Brutale Gtx Black Merk Puma Original Italy Kab Bantul Happy Motorsportkadipiro Tokopedia

Webots Documentation Unimation S Puma 560

Jual Sepatu Running Original Puma Ignite Limitless Sr Fusefit Black White Kota Depok Iyf Store Tokopedia

Jual Produk Sepatu Puma Axis Murah Dan Terlengkap November 2020 Bukalapak
Qt Puma X Fenty Sepatu Sneakers Casual Warna Kuning Shopee Indonesia

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot Trendyol

Jual Sepatu Touring Tinggi Brutale Gtx Black Blue Merk Puma Ori Italy Kab Bantul Happy Motorsportkadipiro Tokopedia

Puma Axis Tr Boot Winter Pure Tex 372382 02 Zimni Obuvki Shopsector Com

Buy Puma Bot Limit Discounts 58 Off

Harga Sepatu Puma Suede Hitam Original Murah Terbaru November 2020 Di Indonesia Priceprice Com

Puma Axis Tr Boot Wtr Pt Erkek Outdoor Bot Trendyol

Jual Produk Sepatu Puma Axis Murah Dan Terlengkap November 2020 Bukalapak
Pdf Two Open Solutions For Industrial Robot Control The Case Of Puma 560

Jual Sepatu Touring Tinggi Bonneville Black Lis Grey Merk Puma Ori Italy Kab Bantul Happy Motorsportkadipiro Tokopedia

Robotics Pioneer Robot Mag

Puma Axis Winter Bot Trendyol

Jual Produk Sepatu Puma Axis Murah Dan Terlengkap November 2020 Bukalapak

Harga Sepatu Puma Evospeed Hitam Original Murah Terbaru November 2020 Di Indonesia Priceprice Com

Buy Puma Bot Limit Discounts 58 Off
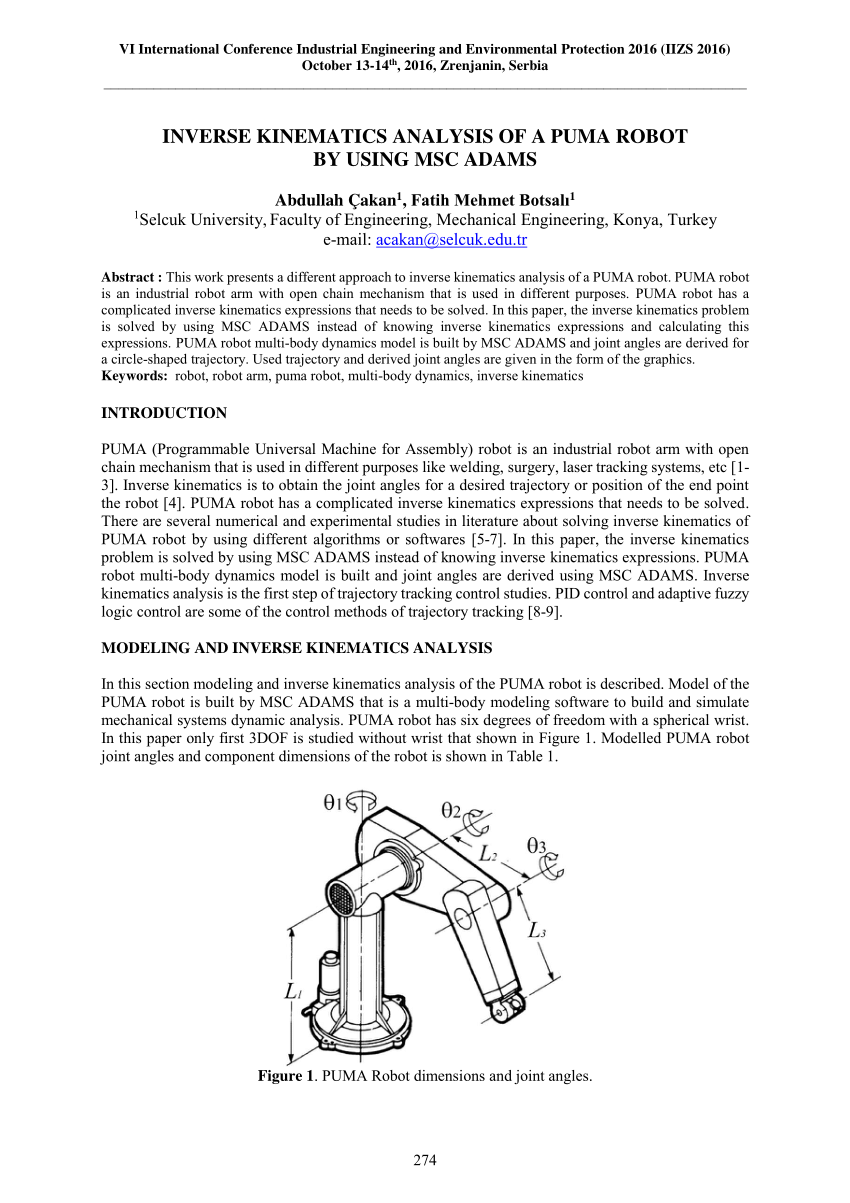
Pdf Inverse Kinematics Analysis Of A Puma Robot By Using Msc Adams

Jual Sepatu Touring Tinggi Bonneville Cream Lis Coklat Merk Puma Ori Italy Kab Bantul Happy Motorsportkadipiro Tokopedia
Sepatu Sneakers Olahraga Model Nike Air Max Axis Warna Putih Untuk Pria Shopee Indonesia

Puma Axis Winter Bot Trendyol

42 Companies Empowering Robots And Humans To Work Side By Side The Robot Report

Axis Trail Men S Winter Boots Puma Us

Puma Bot Fiyat Ve Modelleri

Puma S Beatbot Hits The Track Calls Out Usain Bolt For A Little Training Hothardware
Buy Puma Bot Limit Discounts 58 Off

42 Companies Empowering Robots And Humans To Work Side By Side The Robot Report
Harga Sepatu Puma Fenty Putih Original Murah Terbaru November 2020 Di Indonesia Priceprice Com

Programmable Universal Machine For Assembly Wikipedia

Jual Sepatu Sneakers Puma X Daily Paper Match Raw Edge White Leather Kota Bandung Sepatu Original 07 Tokopedia

Puma Panske Sportovni Boty Vybirejte Z 631 Bot Puma Zde Modio Cz
